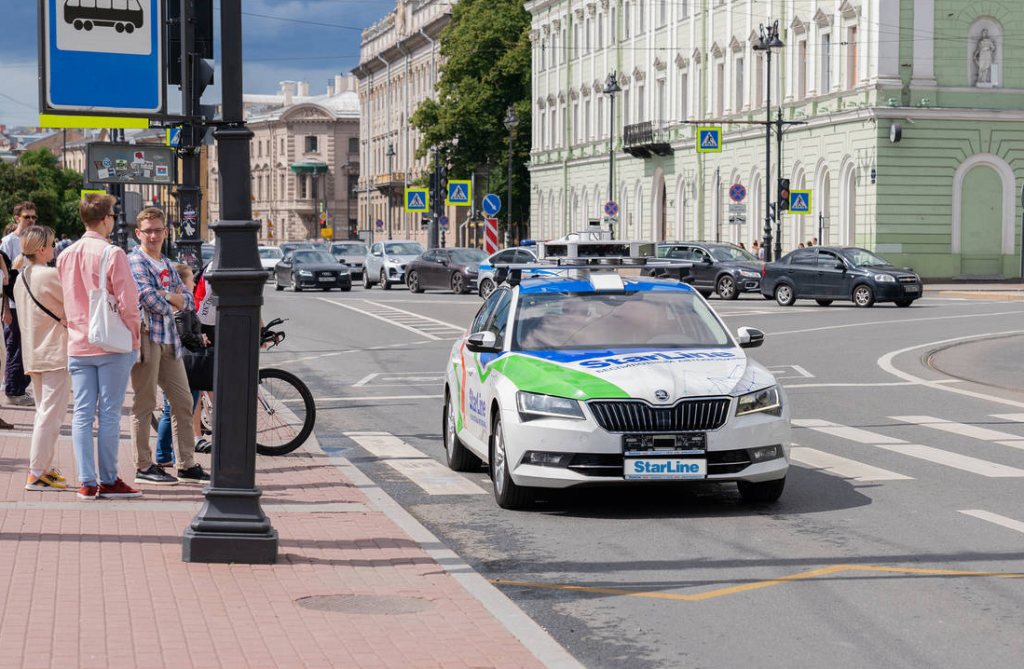
10 июля беспилотный автомобиль StarLine успешно прошел первые испытания на дорогах Санкт-Петербурга. Для тестирования алгоритмов автономного вождения был выбран район Марсова поля – в этой части города достаточно активный трафик, много светофоров, дорожных знаков и пешеходных переходов, что позволило инженерам НПО СтарЛайн протестировать разработанные ими алгоритмы беспилотного вождения в реальной дорожной обстановке.
Напомним, в марте этого года были внесены изменения в Постановление Правительства Российской Федерации, согласно которым расширен список регионов, на дорогах общего пользования которых разрешено тестирование беспилотного транспорта. В числе этих 13 регионов Санкт-Петербург и Ленинградская область.

«Результат первых испытаний вполне хороший. Все алгоритмы, которые мы ранее отрабатывали на закрытых территориях, сегодня успешно работают в условиях реальной дорожной обстановки. Автомобиль детектирует светофоры и другие машины, пропускает пешеходов и выполняет перестроения. Даже внезапно начавшийся дождь не стал помехой для безопасного движения по городу», – рассказывает Борис Иванов, руководитель проекта «Беспилотный автомобиль StarLine»
Во время испытаний за рулем автомобиля находится оператор, будучи готовым в любой момент взять управление на себя. Ему помогает инженер, который следит за техническими показателями и геопозиционированием автомобиля.

Конечно, и трудностей достаточно. Ведь город – это живая, динамичная, постоянно меняющаяся среда.
«Между городом и закрытой площадкой очень большая разница. Даже в конкурсе «Зимний город» в чем-то было проще, ведь городские условия там, хоть и очень хорошо, но все же были сымитированы. Машины на полигоне, создававшие трафик, ездили осторожно, пропускали автомобиль. В городе среда менее тепличная. Движение активное, поведение других участников непредсказуемое», – говорит Антон, инженер-разработчик НПО СтарЛайн.
Вот, вместе с ребятами мы два раза проезжаем один и тот же перекресток. В первый раз за ним никого, и беспилотник спокойно продолжает движение в своей полосе. А на втором круге за перекрестком припарковался автомобиль. Беспилотнику необходимо быстро сориентироваться и выполнить перестроение в соседнюю полосу. Все эти решения он должен принять так же быстро, как обычный водитель. И ему это удается. Хотя, конечно, на то, чтобы сориентироваться, времени требуется пока чуть дольше, чем остальным водителям.

Например, беспилотник достаточно долго пропускает поток машин в соседней полосе. И лишь убедившись, что все проехали, перестраивается и продолжает движение. Так, пожалуй, ведет себя на дороге осторожный новичок. Инженеры НПО СтарЛайн отмечают, что поработают над скоростью «реакции» автомобиля в интенсивном городском трафике.
Первые испытания беспилотника StarLine привлекли большое внимание горожан, а также представителей прессы и Генерального консульства Японии в Санкт-Петербурге. Журналисты доверили свою безопасность автономному транспортному средству и протестировали его на городских дорогах. Беспилотник выполнил свою задачу – провез пассажиров аккуратно и бережно.

С большим интересом опробовала российскую разработку вице-консул Японии Эцука Симода. Во время поездки она задала разработчикам НПО СтарЛайн массу серьезных и достаточно глубоких технических вопросов об оборудовании автомобиля, о построении цифровых карт дорог, о том, как ведется взаимодействие с научным сообществом и другими разработчиками в области беспилотных технологий. Японский вице-консул с интересом наблюдала за 3D-картой, на которой отображалось позиционирование автомобиля и построение маршрута его движения.
Отметим, подготовку к первой автономной поездке по улицам города инженеры НПО СтарЛайн провели самую тщательную. Была составлена цифровая карта местности, по которой предстояло передвигаться беспилотному автомобилю. Карта дает информацию о том, сколько на дороге полос, какая разметка, где расположены светофоры, дорожные знаки, пешеходные переходы. Все это помогает не перегружать оперативную систему транспортного средства. Ну а детектирование участников дорожного движения – автомобилей и пешеходов – осуществляется с помощью датчиков: радаров, лидаров и видеокамер.

«Сегодня мы получили массу полезных данных и новой информации о том, над какими алгоритмами еще предстоит поработать, – рассказывает Андрей, инженер-разработчик. – Как заметили сегодня наши пассажиры, манера движения автомобиля несколько резковатая. Например, при торможении. Ранее, в условиях конкурса «Зимний город» было важно, чтобы реакция автомобиля в любой ситуации была быстрой. Но, конечно, для комфортной поездки пассажира нужно, чтобы беспилотник выполнял все маневры максимально плавно. Поэтому, будем дорабатывать этот момент».
Кроме этого, предстоит оптимизировать софт, с помощью которого ведется совокупный сбор информации со всех датчиков и анализ полученных данных для распознавания объектов на дороге. При большом трафике возрастает и количество данных, получаемых системой. Следовательно, нужно повышать производительность, чтобы она успевала их обрабатывать. Расположение самих датчиков инженеры НПО СтарЛайн также планируют оптимизировать. К примеру, установить сенсоры на боковые крылья автомобиля, чтобы, проезжая в узком месте, взаимодействуя с другими автомобилями в соседних полосах, он мог их лучше распознавать.

Также, добавляют разработчики, предстоит увеличить дальность детекции датчиков.
«Сейчас у верхнего лидара, в зависимости от условий, дальность распознавания объектов до 40 метров. На открытом пространстве при скорости движения в 20 км/час этого было достаточно. Но на больших скоростях, в условиях загруженного города, когда автомобилю нужно перестроиться на скорости в 60 км/час, это расстояние пролетает мгновенно. Чтобы определить, есть ли на соседней полосе автомобили, какое до них расстояние и проанализировать, успеет ли беспилотник перестроиться, ему нужно иметь в запасе больше времени. Следовательно, датчики должны определять объекты с большего расстояния», – объясняет Антон.

«В целом, начало испытаниям на дорогах общего пользования успешно положено. Впереди много интересной работы. Мы продолжим совершенствовать оборудование автомобиля и алгоритмы беспилотного вождения, проводить испытания на Лесном, Большом Сампсониевском, Невском проспектах, а также в Приморском районе города. Результаты дальнейшего тестирования позволят сделать беспилотный автомобиль безопаснее и комфортнее», – заключает Борис Иванов.